《噪声》一书通过系统性研究,通过两个公式揭开了“判断出错”的本质,并且通过对三种噪声的系统性分析带你直击噪声。并且,从六大部分阐述了“噪声”:从寻获噪声到探究人类判断的本质,从预测噪声到阐释噪声的主要原因,从探讨如何改进判断和防止错误的的实际问题,一直延伸到什么才是合适的噪声水平。”“噪声”是随机的,但却是致命的。卡尼曼在书中提出了6大原则,帮你重塑决策框架,做聪明的决策者。同时,卡尼曼更是精妙地附上了“审查噪声”的使用指南,以及写给决策者的“观察者清单”。阅读本书可以助你重塑自己的决策框架,远离噪声,做聪明的决策者。
精彩书摘
哪里有判断,哪里就有噪声,希望你现在也同意这一观点。我们也希望,对你而言,这已不再是一件超乎想象的事。也正是这一目的激励我们着手研究该项目。经过多年的努力,我们对这个问题的思考已经逐渐深入和完善。现在,让我们来回顾一下,我们已经学习过的噪声成分、这些成分对噪声的重要影响以及它们各自在判断中所起的作用。
噪声成分
图16是我们在第5、第6和第16章中介绍的三个方程的一个组合图。该图展示了对误差的三个连续的分解:
•将误差分解为偏差和系统噪声,
•将系统噪声分解为水平噪声和模式噪声,
•将模式噪声分解为稳定模式噪声和情境噪声。
现在,你可以看到MSE如何被分解为偏差,以及(我们曾讨论过的)三种噪声成分的平方。
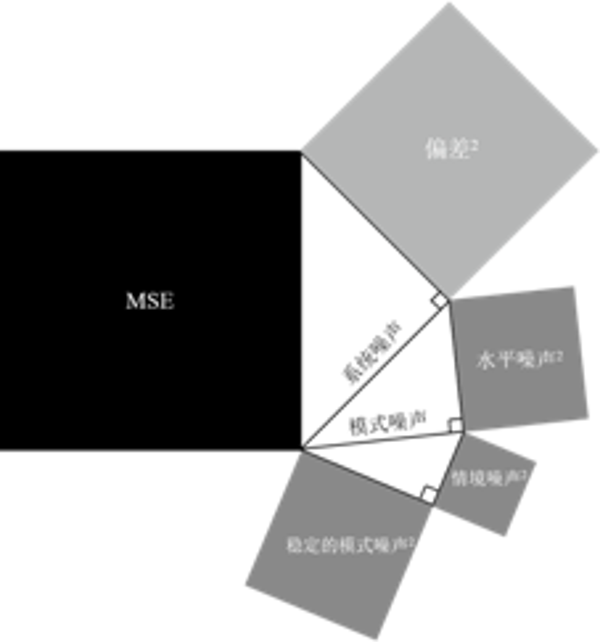
图16:误差,偏差和噪声成分
当我们开始着手这一研究项目时,我们关注偏差和噪声在总误差中所占的相对权重。我们很快得出结论:在误差中,噪声通常比偏差更多,因此,噪声非常值得我们进一步去探索。
我们早期对噪声成分的思考是基于复杂的噪声检测的框架。在该框架中,多个人对多个案例做出判断;联邦法官的研究,以及惩罚性赔偿的研究,都是这样的例子。从这些研究中获得的数据,能够对水平噪声进行可靠的估计。另一方面,虽然每个参与者都对每个案例进行判断,但只进行了一次判断,因此无法判断残差——我们将其称之为模式误差——是变化的还是稳定的。依据统计分析的保守性原则,通常将残视为随机误差。换句话说,模式噪声被完全默认为情境噪声。
很长一段时间以来,这种将模式噪声解释为随机误差的传统做法,限制了我们的思维。专注于水平噪声(严厉和宽容的判断者之间、或乐观和悲观的预测者之间的稳定性差异)似乎是自然而然的事。但是,有证据表明,那些无关的、变化的环境也会影响判断,从而产生情境噪声,这引起了我们的研究兴趣。
这些证据让我们逐渐认识到,不同人做出的判断充满噪声,很大程度既不是因为普遍性的偏差,也并非是由于变化的或随机的因素所致:特定个体对多重特征的稳定的、个性化的反应,决定了他们对特定案例的反应。我们最终得出结论,我们应该摈弃将模式噪声视作随机变化的观点。
虽然我们很想谨慎一点,尽量避免基于有限的案例做出过度性概括。然而,整合我们研究后发现,稳定的模式噪声实际上比系统噪声的其他成分都更为重要。由于我们很少在同一研究中全面地探究误差的各个组成部分,因此需要进行精确的分析才能得出这样一个暂时性的结论。简而言之,以下就是我们所知道的和所不知道的。(摘自第17章 噪声源:偏差是引人注目的图形,而噪声是不受我们关注的背景)